Difference between revisions of "Main Page"
| Line 1: | Line 1: | ||
| − | + | [[File:Cansat-2.jpg|200px|thumb|right|CanSat]] | |
| + | This wiki presents a possible setup for the [https://www.hes-so.ch/swisscansat Swiss CanSat] competition. | ||
| − | + | = Development = | |
| − | == | + | The work consists to build a [https://en.wikipedia.org/wiki/CanSat system in the shape of a soda can] |
| − | * [https://www. | + | which will be launched at about 1 km altitude. |
| − | * [https://www. | + | As a primary mission, the CanSat will log temperature and pressure during the whole flight. |
| − | * [https:// | + | Additionally, a secondary mission is defined by each competition group. |
| − | * [https://www. | + | |
| − | * [https://www. | + | Additionally to the system engineering, the work comprises the [[development]] of: |
| + | * the control and data acquisition [[electronics]] | ||
| + | * the [[power supply]] | ||
| + | * the [[enclosure]] | ||
| + | * the [[parachute]] | ||
| + | |||
| + | == Electronics == | ||
| + | |||
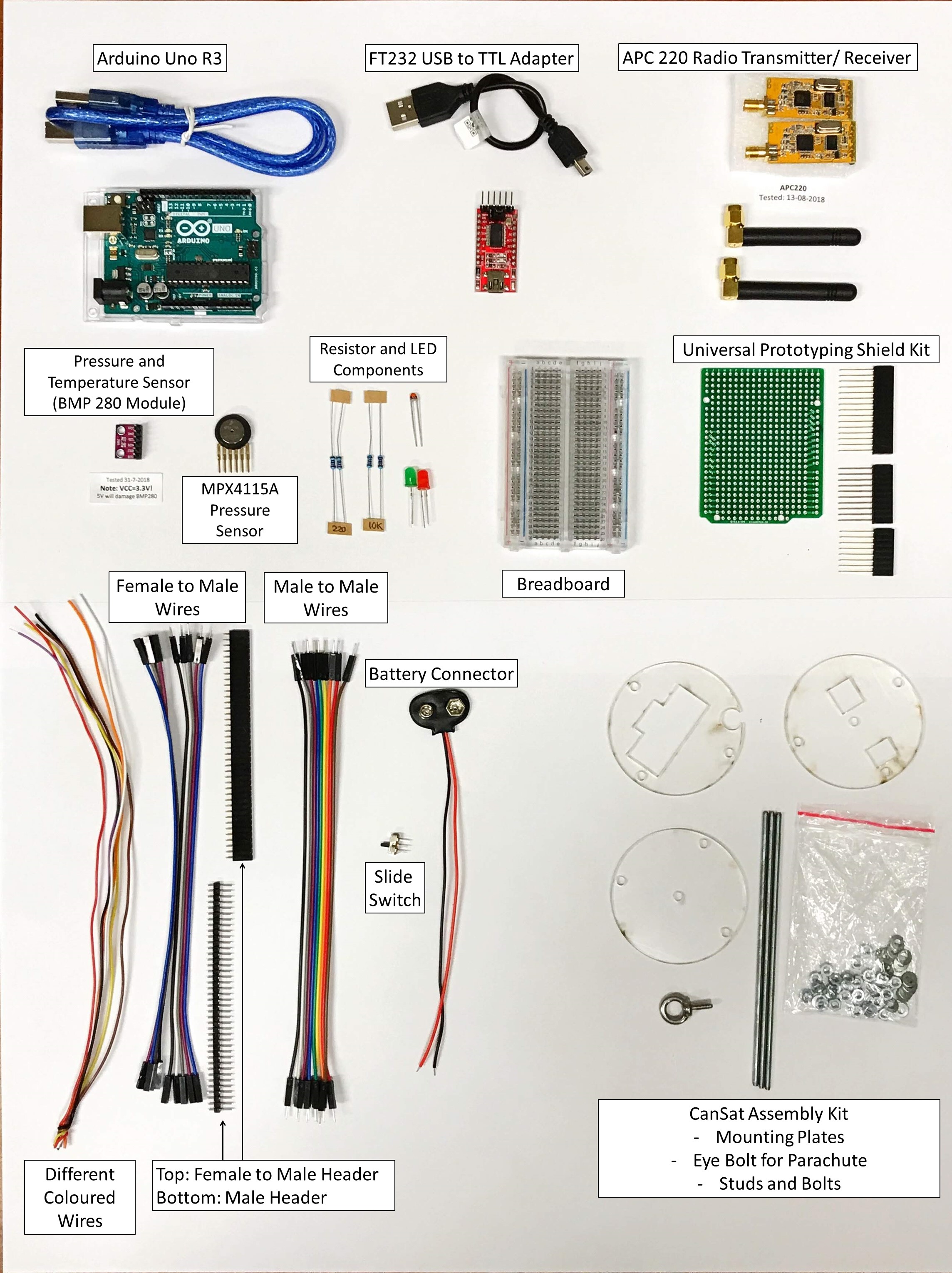
| + | [[File:Swiss kit.jpg|200px|thumb|right|CanSat kit]] | ||
| + | The CanSat [[electronics]] bases on a kit comprising: | ||
| + | * a [[Raspberry Pi pico]] control board | ||
| + | * a [https://www.adafruit.com/product/4716 temperature, humidity and pressure sensor] | ||
| + | * a Printed Circuit Board (PCB) development set: | ||
| + | ** [https://www.adafruit.com/product/239 breadboarding PCB] | ||
| + | ** [https://www.adafruit.com/product/723 prototyping PCB] | ||
| + | ** 1 x 20 pin header rows | ||
| + | ** breadboarding cables | ||
| + | ** on/off slide switch | ||
| + | ** [https://www.adafruit.com/product/4203 LEDs] and 330 Ohm resistors | ||
| + | ** [https://www.adafruit.com/product/367 button switches] | ||
| + | ** a [https://www.adafruit.com/product/160 buzzer] which works well around 4 kHz (C<sub>8</sub> = 4186 Hz) | ||
| + | * a power supply: | ||
| + | ** a [https://www.adafruit.com/product/2011 battery] | ||
| + | ** a [https://www.adafruit.com/product/1904 battery charger] | ||
| + | ** a [https://www.diodes.com/assets/Datasheets/ZVP4424A.pdf p-channel MOSFET] | ||
| + | |||
| + | The developers should have access to: | ||
| + | * a welding station | ||
| + | * micro-USB cables | ||
| + | * tools (screwdrivers, pliers, ...) | ||
| + | |||
| + | == Software == | ||
| + | |||
| + | If using the [[Raspberry Pi pico]], the developers should install: | ||
| + | * [https://codewith.mu/ Mu Editor] | ||
| + | |||
| + | == Housing == | ||
| + | |||
| + | The system must fit inside a cylindrical [[enclosure]] of 115 mm height and 66 mm diameter. | ||
| + | |||
| + | The mass of the CanSat is limited to 350 grams. | ||
| + | |||
| + | The antennas, transducers and other devices of the CanSat cannot oversize the can diameter until it leaves the launching system. | ||
| + | The deployable subsystems and recovery system can exceed the length of the primary structure, up to a maximum length of 230 mm. | ||
| + | |||
| + | The Swiss Kit housing weighs about 100 g. | ||
| + | It comprises: | ||
| + | * a botton plate and a top plate | ||
| + | * 6 walls | ||
| + | * 12 M3 bolts and screws | ||
| + | |||
| + | = Getting started = | ||
| + | |||
| + | Obviously, the first step is to go through the [[Development#Specifications|specifications]]. | ||
| + | |||
| + | Next, the structure of the team has to be defined. | ||
| + | It is of usual practice to have one responsible team member who knows what each group (electronics, mechanics, ...) is doing | ||
| + | and what information he has to share between the groups. | ||
| + | |||
| + | == Electronics == | ||
| + | |||
| + | Some of the boards are programmed using [http://micropython.org/ MicroPython]. | ||
| + | [https://www.adafruit.com/ Adafruit] maintains a variant called [https://learn.adafruit.com/welcome-to-circuitpython/overview circuitPython]. | ||
| + | A common development IDE is [https://codewith.mu/ Mu Editor] which works on different operating systems, | ||
| + | including [[Install Mu Editor#Linux|linux]] and [[Install Mu Editor#Windows|Windows]]. | ||
| + | |||
| + | Start by; | ||
| + | * [[Install Mu Editor#Install_Mu-Editor|installing Mu Editor]] | ||
| + | * [[Install Mu Editor#Install_CircuitPython|installing CircuitPython]] on the Raspberry Pi Pico | ||
| + | * trying out [https://learn.adafruit.com/getting-started-with-raspberry-pi-pico-circuitpython/circuitpython-programming-basics some simple examples], all the way to blinking the Pico board's LED | ||
| + | |||
| + | == Enclosure == | ||
| + | |||
| + | The enclosure will have to withstand a landing. | ||
| + | A first model can be built and tested to fall on grass and then on concrete. | ||
| + | Obviously, this first enclosure has to be filled with ballast in order to weigh about 300 g. | ||
| + | |||
| + | == Parachute == | ||
| + | |||
| + | The [[parachute]] design can also start from the first day. | ||
| + | |||
| + | = Links = | ||
| + | |||
| + | Kits : | ||
| + | * [http://canduino.eu/ canduino] | ||
| + | * [https://esero.ie/wp-content/uploads/2018/12/CanSat-UserManual-2019.pdf Ireland kit] | ||
| + | * [https://www.narom.no/undervisningsressurser/the-cansat-book/introduction-to-cansat/the-cansat-kit/ Norway kit] | ||
| + | * [https://mcst.gov.mt/wp-content/uploads/2018/10/CanSat-kit.jpg Malta kit] | ||
| + | * [https://www.esero.lu/wp-content/uploads/2020/12/Cansat_kit_2020-2021.pdf Luxembourg kit] | ||
| + | * [https://www.ptrobotics.com/cansat/7505-kit-workshop-cansat.html Portugal kit] | ||
| + | * [http://www.stensat.org/products/product3.html Stensat kit] | ||
| + | |||
| + | presentations: | ||
| + | * [http://esero_production.67a9f12c562e4385958ef41a7bba215b.objectstore.eu/system/uploads/files/000/006/745/original/The_CanSat_Book_2018-2019_Version_sept_2018.pdf Dutch CanSat book] | ||
| + | |||
| + | [[Category:all]] [[Category:management]] | ||
Revision as of 17:04, 23 November 2021

This wiki presents a possible setup for the Swiss CanSat competition.
Contents
Development
The work consists to build a system in the shape of a soda can which will be launched at about 1 km altitude. As a primary mission, the CanSat will log temperature and pressure during the whole flight. Additionally, a secondary mission is defined by each competition group.
Additionally to the system engineering, the work comprises the development of:
- the control and data acquisition electronics
- the power supply
- the enclosure
- the parachute
Electronics

The CanSat electronics bases on a kit comprising:
- a Raspberry Pi pico control board
- a temperature, humidity and pressure sensor
- a Printed Circuit Board (PCB) development set:
- breadboarding PCB
- prototyping PCB
- 1 x 20 pin header rows
- breadboarding cables
- on/off slide switch
- LEDs and 330 Ohm resistors
- button switches
- a buzzer which works well around 4 kHz (C8 = 4186 Hz)
- a power supply:
The developers should have access to:
- a welding station
- micro-USB cables
- tools (screwdrivers, pliers, ...)
Software
If using the Raspberry Pi pico, the developers should install:
Housing
The system must fit inside a cylindrical enclosure of 115 mm height and 66 mm diameter.
The mass of the CanSat is limited to 350 grams.
The antennas, transducers and other devices of the CanSat cannot oversize the can diameter until it leaves the launching system. The deployable subsystems and recovery system can exceed the length of the primary structure, up to a maximum length of 230 mm.
The Swiss Kit housing weighs about 100 g. It comprises:
- a botton plate and a top plate
- 6 walls
- 12 M3 bolts and screws
Getting started
Obviously, the first step is to go through the specifications.
Next, the structure of the team has to be defined. It is of usual practice to have one responsible team member who knows what each group (electronics, mechanics, ...) is doing and what information he has to share between the groups.
Electronics
Some of the boards are programmed using MicroPython. Adafruit maintains a variant called circuitPython. A common development IDE is Mu Editor which works on different operating systems, including linux and Windows.
Start by;
- installing Mu Editor
- installing CircuitPython on the Raspberry Pi Pico
- trying out some simple examples, all the way to blinking the Pico board's LED
Enclosure
The enclosure will have to withstand a landing. A first model can be built and tested to fall on grass and then on concrete. Obviously, this first enclosure has to be filled with ballast in order to weigh about 300 g.
Parachute
The parachute design can also start from the first day.
Links
Kits :
{kind=link}
presentations: